






2022/08/29
2162
产学用如何推动机器人新突破、强落地——机器人智能论坛圆满落幕 - 自动化技术及装备展览会siaf
广州国际工业自动化技术及装备展览会即将于2023年3月1-3日在中国进出口商品交易会展馆B区举行。邀您关注广州国际工业自动化技术及装备展览会今日新资讯:
共聚云端,共话智能机器人。
8月27日下午,“机器人智能论坛”以线上分享的形式圆满举行。
该活动由中国人工智能学会主办,中国人工智能学会认知系统与信息处理专委会、南京清湛人工智能研究院承办,北京容天汇海科技有限公司、镁客网协办。

在历时4个半钟头的分享环节,来自产业、学术和应用三个方向的嘉宾,构成了一个产学用全方位的“三方对话”,围绕智能机器人相关主题带来了各自的精彩分享。
陈学超 北京理工大学机电学院教授、博士生导师
——仿人机器人高动态跳跃运动关键
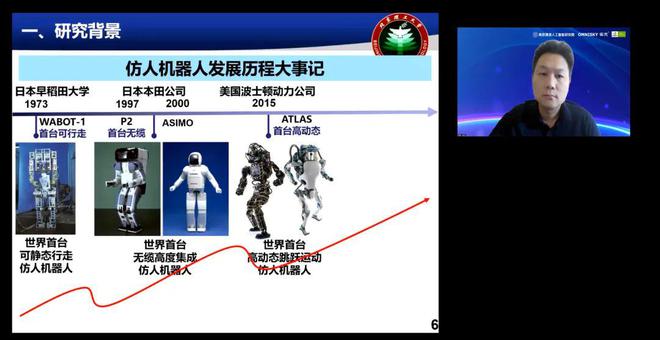
在陈学超看来,仿人机器人是智能机器人的一种高级形态,具有两手、两腿、头部和躯干等人类外形颜色特征,整机有30至60个自由度,有着复杂的多体动力学系统,在公共安全、国防、社会服务等领域应用前景广泛。
回顾仿人机器人发展历程大事记,自1973年日本早稻田大学研发出首台可行走仿人机器人之后,包括日本本田公司的ASIMO、波士顿动力公司的Altas等都是里程碑式的产品。
而从自身研究项目出发,陈学超表示跳跃能力对仿人机器人增长运动敏捷性和环境适应性有着重大意义,意味着机器人能够在室内外、野外环境中做到跑得快、跳得高,同时能够执行多种灵巧作业任务。其中所涉及的核心部件和多模态运动技术,也是其汇童仿人机器人项目当下的研究重点。
陈学超阐述道,经过对跳跃运动阶段划分并进行特点分析后得到总结,机器人:
起跳阶段——要求硬件本体需要做到大力矩、高转速,规划、控制方面做到协全身、精跟随;
落地阶段——要求硬件本体需要做到强回驱,规划、控制方面做到柔着地。
这一前提下,陈学超也指出,传统仿人机器人关节(电机+谐波)力矩达到,但转速低、回驱性弱,无法满足需求,一般四足机器人关(电机+行星)也因为力矩小而难以适用。针对这一点,他也提出了一些解决方案,包括采用高磁能密度硬磁材料打造高扭矩密度电机,并基于多物理场综合优化技术提升转矩,以及模拟人体肌肉布局作仿生跨关节耦合驱动,同时优化变速结构比等等。
此外,针对特斯拉、小米等企业对仿人机器人的布局,陈学超表示这类企业的入局将推动人工智能技术在仿人机器人产品上的落地,进而推动仿人机器人整体产业的发展。与此同时他也指出,小米能够在几个月内打造一台仿人机器人,并完成一些基本操作,也是从另一个角度告诉大家,仿人机器人研发的行业门槛较之前已经有所降低。
葛荣骏 东南大学计算机科学与工程学院副教授
——用算法弥补国产成像设备硬件不足
围绕人工智能与机器人产业,医学是一个绕不过去的细分市场,其中关于影像设备成像,更是一个重点研究方向。
葛荣骏表示,眼下国内医学影像设备正被国外企业垄断,国产设备则存在成像质量不足的问题。他以CT为例,常规CT存在辐射剂量较大、软组织分辨率较低等问题,既会给孕妇、新生儿等高敏感人群带来较大安全风险,也会对其临床应用范围造成诸多约束,同时不同诊疗场景的CT成像也受制于采集数据信噪比低或数据稀疏不全等问题。市场侧,85%以上相关设备市场则是被国外公司GPS垄断。
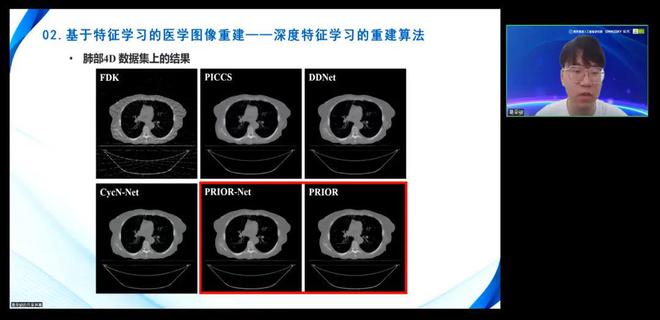
针对国产设备成像不足的问题,葛荣骏表示可以通过成像算法来进行弥补——基于不同临床诊疗需求场景,非理想采样条件的下优质CT成像算法。
围绕这一研究,葛荣骏也指出传统成影方法“解析重建”需要高质量且完整的投影数据,无法应对低剂量和不完备数据重建,且特征提取能力弱,容易引起二次伪影,同时迭代速度慢,科学挖掘点少。
在这一基础上,基于特征学习的CT成像算法受到关注,包括基于单层特征学习的字典学习算法、基于深度特征学习的重建算法。其中,深度特征学习能快速、充分地利用单层特征和各级深度特征,在最终效果上优于单层特征学习。
李雨倩 NVIDIA自主机器技术专家
——基于Isaac Sim平台为机器人训练“提速”
不管是算法开发,还是智能机器人研究,过程中总是需要大量的数据处理与模型测试、验证。而如果这些工作全部交由单个项目或企业来进行,将面临时间长、挑战大、成本高,以及相关场景中结构化环境缺失等问题。
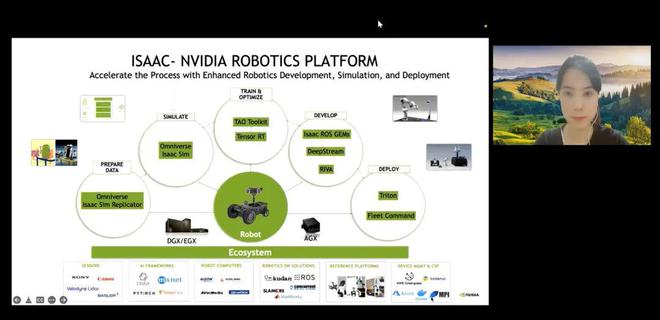
针对这一点,李雨倩提出的解决方案是NVIDIA Isaac Sim,这是一个建立在数字孪生Omniverse平台上的机器人模拟应用与合成数据生成工具,能够提供真实准确的自然世界虚拟表示,允许导入各种对象类型,包括CAD文件,以生成在逻辑上与现实世界无法区分的模拟环境。
李雨倩表示,在Isaac平台,仅需要4个步骤就可以完成一个闭环应用的开发:
模型训练——通过Isaac Replicator(形成虚拟合成数据集)、Tao Toolkit(训练预训练的模型)工具对机器人进行训练;
仿真——在整个Omniverse环境下,基于Isaac Sim对整机进行仿真和测试,模型训练好,整机算法测试完成之后就到第三步搭建;
搭建——在机器人本体嵌入式计算平台Jetson上,利用Iassc ROS GEMs、RIVA、Nova Orin等来做一个整个机器人的搭建;
部署&管理——利用Triton做多个资源的调动管理,利用CuOpt做大场景下机器人最优路径的规划……
“实际环境测试之后会暴露出机器人本身的一些问题和模型的不足,就可以回到第一步再完成一个训练。”
此外,李雨倩也总结称,该平台有测试场景和样本,可以直观体验Isaac Sim的一些功能;可以跟ROS生态进行互动;增加了AI的属性,包括强化学习等都集成在里面,基于这些优势,将能够帮助大家快速搭建自己的应用,开发一个更智能的、具有AI属性的机器人。
王亮 NVIDIA高级解决方案架构师
——硬件加速机器人仿真与训练
面向海量数据处理与模型测试与验证,除了平台层面各类软件工具的协助,背后的算力支撑也是不可或缺的。针对这一点,王亮主要从NVIDIA A40和A100两款产品进行讲解。
其中,提及A40就不得不提到“NVIDIA OVX”,这是为了在Omniverse中运行数字孪生模拟而创建的数据中心级计算系统,由8块NvidiaA40 GPU、3块Nvidia ConnectX-6 Dx200 Gbps网卡、双Intel Ice Lake 8362 CPU、1TB系统内存和16TB NVMe存储组成,启用RDMA以实现最低延迟,支持精确计时 (PTP),可扩展以满足工作负载需求。
并且,当使用Spectrum-3交换机连接时,OVX计算系统可以从包含8台OVX服务器的单个Pod扩展到32台OVX服务器的超级Pod。多个超级POD可以用于部署更大的仿真需求。
至于A100,王亮表示“A100 80GB PCIE”是世界上性能最高的AI超级计算GPU,也是主流EGX服务器的灵活部署选项。性能方面,相较于上一代产品,面对仿真、AI训练等应用均得到了数倍的提升。
同时,王亮也提到了基于A100打造(20台起步)的DGX SuperPOD系统,串联后将形成一站式AI超级计算机,基于并行计算实现大规模AI模型的构建、训练和部署。
孙玉洁 中国兵器工业集团高级工程师
——未来机器人作战样式
就分类来看,智能机器人可以分为多种类型,工业机器人体量最大,消费级商用机器人更为贴近日常生活,特种机器人则较为少见,其归属下的军用机器人,更是“神秘”。
对此孙玉洁讲到,军用机器人依据作战环境的不同分为地面军用机器人、空中军用机器人、其他军用机器人(如无人艇、无人船等)。
提及需求,军用机器人部队则是需要做到三点,分别是能够聚焦全维感知、街区突贯、要点夺控、楼宇清缴等城市作战环境,实现信息主导、火力主战、智能主控、体系致胜,做到多域精确跨域协同。
只是就目前来看,军用机器人部队在构建上还存在一些短板,这也对当前业界提出了几点建议:
第一,发展机器人弹性算力和可拓展的硬件平台,设计相关接口和标准协议,基于“软硬解难”思路,提升硬件能力;
第二,完成地面军用机器人、空中军用机器人及其他机器人部队体系要素的需求论证;
第三,统筹推进相关科技竞赛,以及优质智能技术成果的转化应用。
届时,比如空中机器人,将能够做到集侦查、监视、软干扰和硬打击于一体,以及长时滞空、空中战场遮断、空中格斗等等。地面机器人则将呈现“无人军团”模式,就像电影中的机械战士。
黄洪波 墨影科技联合创始人、VP
——机器人产业“非标+长尾”现象如何破局?
黄洪波以冰山作比,浮出水面的一小块冰山是如今简单容易的项目或值得投入的大客户,但另外沉在水面下、体积占比约80%的冰山则代表着那些无法被触达和满足的大量潜在需求机器人和自动化改造的行业和项目。
这也导致虽然机器人市场各垂直场景的价值达到了千亿级、万亿级,大量机器人公司和集成商也仅仅是在“冰山一角”中进行竞争。
为什么会这样?黄洪波解释道,机器人企业开拓产品、集成商部署项目少则一两年,多则三五年,投入资源重、周期长、成本高迫使他们提高报价、延长实施周期,继而导致机器人和自动化改造价格高、周期长。但对于客户来说,他们的需求是快速完成机器人和自动化改造,降低产险停产时间,实现降本增效目的,也因此,低价格、短周期的压力自然而然就给到了企业和集成商,最终造成机器人企业、集成商普遍存在低价竞争、亏本赚吆喝现象。“这就是一个恶性循环。”
当然,目前存在的“非标+长尾”现象只是机器人产业发展过程中阶段性的必然结果,“需求种类和数量进一步增加,单一厂商的能力和开发速度逐渐无法满足所有需求, 跨厂商系统集成又异常复杂,与此同时很多客户想用机器人和自动化,但需求和场景各不相同,导致非标+长尾。”
至于如何破局,响应“更快满足急速增长的客户需求、更快更简单地开发新产品新功能”的趋势,黄洪波则是提出“平台型系统”。在其看来,平台型系统将能够提供行业基础共性功能,简化开发流程, 整合上下游,进而共同促进行业爆发。
杨磊 南京清湛人工智能研究院执行副院长
——“云+边+端”架构赋能机器人视频感知
在杨磊看来,产业内诸多公司为机器人的感知和计算基础都提供了杰出的支撑,但就目前来说,“感知”依旧是机器人技术发展的一个重要瓶颈。
其中,视频感知不同于以往更多讨论的机器视觉,所处理的数据基本上是实时连续帧图片序列,需要处理的数据量更大,且多数数据都没有经过加工处理器,落地之后更具实用性,是眼下计算机视觉与人工智能领域发展比较活跃的研究方向。
“相较于视频监控,视频感知除了要获取数据、分析数据,还要理解视频内容以及目标前后关系。”
而就落地来看,随着工业场景新需求的出现,传统视频监控已经不足以完成安全保障等方面的新挑战,视频感知逐渐在工业场景获得极大应用。
与此同时,就机器人整个发展来看,“原先机器人平台算力较小,存在巨大的算力障碍,而现在提出的新架构——‘云-边-端感知架构’,依据不同场景需求通过云端或边端的算力去解决算力不足的问题,帮助进行视频运算和解析,这是未来发展的一个重要方向。”
针对这一点杨磊也说到,清湛人工智能研究院采用“云+边+端”架构打造了一套基于视频行为分析的智能监造系统,在前端网络中增加边缘分析设备,基于计算机视觉深度学习技术,构建专有的安全生产预警模型,是面向大型企业用户,提供简单、易用、优质视觉算法的开放平台。
文章来源:网易新闻
2023广州国际工业自动化技术及装备展览会即将于2023年3月1-3日在中国进出口商品交易会展馆B区举行。SIAF展会是专业的工业自动化技术展览会,它涵盖了一系列从零部件到整套设备和集成自动化解决方案。本届展会主题: 工业机器人及机器视觉、感应技术、工业测量及仪器仪表、连接技术、智能仓储、物流集成解决方案、电气系统、工业互联网;广州国际工业自动化技术及装备展览会更多资讯,详情请登陆官网 https://spsg.gymf.com.cn
扫码实名预约,领取入场证!

| 凡本网注明“来源:广州光亚法兰克福展览有限公司”的所有作品,版权均属于广州光亚法兰克福展览有限公司,转载请注明。 凡注明为其它来源的信息,均转载自其它媒体,转载目的在于传递更多信息,并不代表本网赞同其观点及对其真实性负责。若作者对转载有任何异议,请联络本网站,联系方式:020-89816057;我们将及时予以更正。 |


深耕自动化,成就多元产业应用
欢迎莅临广州国际智能制造技术与装备展览会!
主办单位官方微信

