






2024/06/21
1353
人形机器人六维力传感器的曙光将至? - 工业机器人展
广州国际智能制造技术与装备展览会即将于2025年2月25-27日在中国进出口商品交易会展馆举行。邀您关注广州国际智能制造技术与装备展览会今日新资讯:
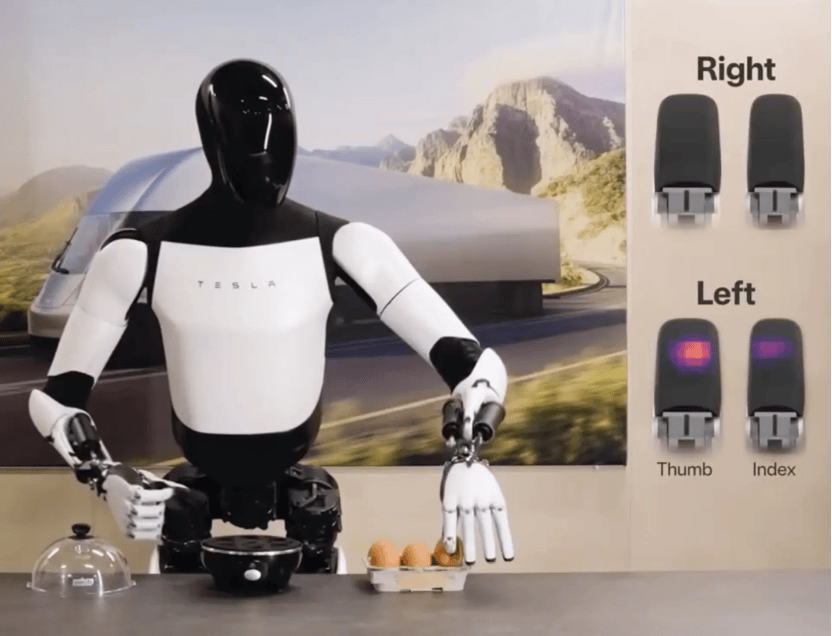
特斯拉在2023年12月12日公布的Optimus-Gen2视频中展现了其人形机器人在操控领域所取得的明显进步。
通过精准的力度感知和控制,力传感器赋予机器人能力执行更为复杂和精细的任务,从而提高了其在实际场景中的适应性和可靠性。以下总结了视频中的要点以及力传感器在其中发挥的作用:
- 抓取和放下鸡蛋:机器人可以轻松、准确地抓取和放下鸡蛋,彰显其精湛的操控技能和对力度的精准掌控。
力传感器在此发挥了至关重要的作用,帮助机器人感知握力大小,确保不会损坏易碎物品。
- 左手转右手:机器人可以顺畅地将物品从一只手转移到另一只手,这需要精准的力控制和协调。力传感器在此帮助机器人感知和调节传递物品时的双手力度,以确保平稳过渡。
- 90度深蹲:机器人能够平稳地做出90度深蹲,这需要全身多关节的协调和平衡。力传感器在此过程中帮助机器人感知身体各个部位的受力情况,以保持平衡和稳定。
- 行走速度调整:机器人的行走速度变化表明其能根据需要调整步伐,这同样需要力传感器感知足部与地面的接触力度,以及调整步伐时的力矩。
- 腿部设计:机器人的腿部和足部设计灵感来自人类形态,有助于其在不同地形上行走。力传感器在此帮助机器人感知地面硬度和不平整程度,进而调整步伐和保持平衡。

力传感器是一种设备,用于检测和度量施加在其上的力、力矩或力觉,并将其转换为电信号或其他形式的信号,以便进行信息的采集、传输、处理、分析和显示。在工业自动化、机器人技术、医疗设备和交通运输等多个领域中,力传感器都具有广泛的应用。
力传感器由本体单元和应变/形变检测系统组成,包括力敏元件、转换元件和信号处理单元等部分,能够将检测到的信息转换为电信号输出,以满足传输、处理、存储、显示、记录和控制等方面的需求。
当有力作用时,力会施加在传感器的本体单元上,并引起本体单元的应变或形变。检测系统能感知本体的应变或形变,通过电路转化为相应电压,最终实现对力的测量和输出信号的生成。
在力传感器的组成元件中,力敏元件用于直接感受或响应被测量的部分,转换元件则负责将感受的力转换成适合传输或测量的电信号。
应变式力传感器的例子中,弹性敏感元件(弹性体)常用铝合金、合金钢或不锈钢制成,而转换元件则是贴在弹性体上的应变片(计),如电阻应变片。
信号处理单元则通常由电路构成,包括漆包线、PCB板等,其中应变片在电路中扮演电阻的角色。
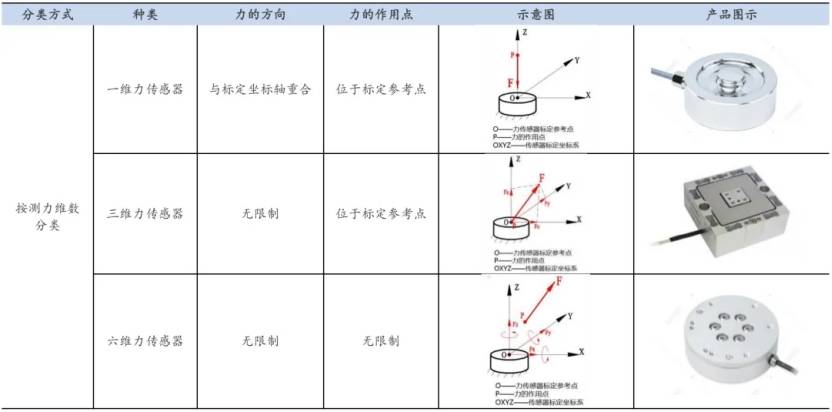
力传感器可以根据测量维度的不同进行分类,分为一维至六维力传感器。这些不同类型的传感器根据其测量力的方向和作用点不同,适用于各种不同的应用场景:
- 一维力传感器:仅能测量沿特定方向的力,适用于力的方向和作用点固定的情况,例如简单的称重或压力测量,代表产品有称重传感器和压力传感器等。
- 二维力传感器:能够测量两个正交方向上的力,通常是水平和垂直方向,适用于需要同时测量两个方向力的应用,如某些类型的推力测量。

- 三维力传感器:可测量三个正交方向上的力,通常为X、Y和Z轴方向,适用于需要测量空间中任意方向力的场景,如机器人的力控制。
- 四维力传感器:在三维力传感器基础上增加了对某一方向力矩的测量,适用于需要了解力的方向和产生力矩的复杂应用。
- 五维力传感器:测量三个正交力和两个正交力矩,这种传感器的应用相对较少,但提供更全面的力和力矩信息。
- 六维力传感器:是一种特殊力传感器,能够同时测量三个正交力和三个正扭矩,是维度最高的力觉传感器,能够提供最全面精准的力觉信息。
六维力传感器适用于需要精确控制和感知复杂交互力的应用,如机器人手术、精密装配和拖动示教等。
一维、三维和六维力传感器是最常见的,而二维、四维和五维力传感器较为罕见。
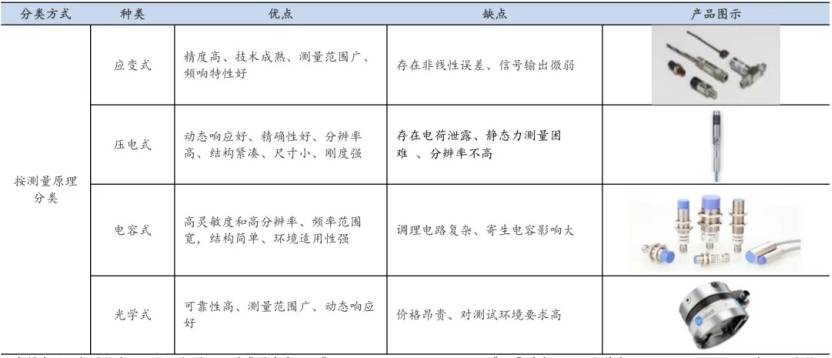
根据测量原理的不同,力传感器可分为光电式、应变式、电容式和压电式等多种类型。
每一类传感器都展现着独特的优势与限制,选择适合的传感器类型通常取决于具体应用的需求,如测量范围、精确度、响应速度、成本以及环境条件等。
在这些类型中,应变式力传感器具有最为广泛的应用范围。尽管压电、电容和光电原理的力传感器在理论和实验方面有一定基础,但其在实际应用中尚未得到广泛采用。
应变式力传感器是利用材料在受力时产生的形变来测量力。通常,应变片(一种敏感元件)被粘贴在基底材料上,当基底受力变形时,应变片的电阻会发生变化,通过测量电阻变化来确定受力大小。
它们因其稳定性、高刚度、高信噪比、高精度、低成本和易于使用而广受欢迎,广泛应用于工业自动化、机器人和各种测试设备。
应变式力传感器按照应变片的分类,可以分为金属电阻应变片(工具钢、不锈钢、铝合金或铍铜等)或硅(半导体)应变片力传感器,后者性能更好。
由于半导体应变片的高灵敏度和快速响应能力,它们在需要精确测量微小力的应用中非常有用,例如在精密仪器、微电子设备和生物医学工程中。
而金属应变片由于其稳定性和耐用性,更适合于工业环境中的力测量。在选择力传感器时,需要根据具体的应用需求和环境条件来决定使用哪种类型的应变片。
例如,如果应用需要在高温或恶劣环境下工作,可能更倾向于选择金属应变片;而如果需要测量微小力或实现高精度控制,则半导体应变片可能是更好的选择。
03
力传感器产业链
力传感器的设计和制造涉及力学、材料科学、电子工程等多个技术领域。以应变式传感器为例,力传感器产业链上游主要为材料类、元器件及组件类、生产或检测设备等细分行业,中游主要为力传感器的加工制造和封装检测,下游应用领域广泛,可应用于工业、消费电子、汽车电子、机器人、医疗、航空航天等领域。
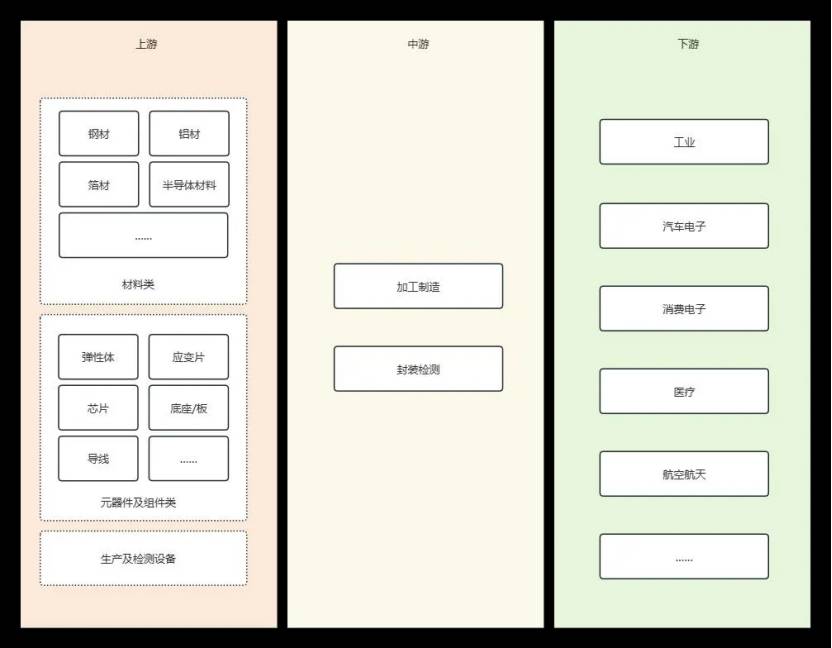
力传感器产业链,资料来源:柯力传感招股说明书
04、六维力传感器核心参数及关键技术
六维力传感器主要包括电容式、压电式、光电式和应变片式等类型。目前,市场应用的六维力传感器大部分是基于应变式的测量。六维力传感器的设计和实现远比简单地组合三个一维力传感器和三个扭矩传感器要复杂得多。它的非线性力学特征明显,要考虑多通道信号的温漂、蠕变、交叉干扰、数据处理的实时性,再加之六维联合加载标定的复杂性 ,六维力传感器的技术难度可谓是一维力传感器难度的六次方。
六维力传感器能给出最为全面的力觉信息以及提升传感精度,并非是多个低维的力传感器可替代的。六维力传感器能够同时测量三个空间方向上的力(Fx、Fy、Fz)和绕这三个方向的力矩(Mx、My、Mz),提供了一个完整的力和力矩的矢量描述。由于力是矢量量,具有大小和方向,六维力传感器能够准确测量力的方向,而不受力作用点变化的影响。当使用多个低维力传感器组合时,每个传感器的测量误差可能会累积,而且它们之间可能存在耦合误差,而六维力传感器作为一个整体,可以减少这些误差源。
核心参数
六维力传感器的主要性能参数包括:量程、过载能力、分辨率、重复精度、串扰、准度等。在选择六维力传感器时,需要综合考虑这些性能参数以及应用场景的具体要求,以确保传感器能够满足所需的性能标准。
测量范围(量程):这是传感器能够测量的最大力量和力矩的范围。选择传感器时,需要确保其量程能够覆盖预期的最大力量和力矩。
过载能力:这个参数表明传感器能够承受的最大力量和力矩超过其额定量程的程度,而不会导致传感器损坏或性能下降。过载能力对于确保传感器在意外或极端条件下的耐用性非常重要。
分辨率:分辨率是传感器能够检测的最小力量或力矩变化。对于需要精细力控制的应用,高分辨率的传感器是必要的。
重复精度(精度):这个参数反映了传感器在多次测量同一值时的一致性。高重复精度意味着传感器在连续测量中提供的结果更加稳定和可靠。
串扰:衡量传感器不同方向的力间的耦合干扰,是反映六维力传感器制造、标定水平的核心指标之一。低串扰意味着传感器在测量时各方向之间的干扰较小,这对于精确测量至关重要。
准度:准度是传感器测量值与实际值之间的差异的综合体现,包括了滞后、线性度和蠕变等误差因素。高准度的传感器能够提供更接近真实值的测量结果,是评价传感器性能的关键指标。
关键问题
六维力传感器的关键技术主要集中在技术实现、性能优化、应用集成等方面,具体包括:
动态响应能力:六维力传感器需要快速准确地响应动态力变化,如机器人打磨抛光时的接触力或物体高速运动过程中的称重。
全方位机械过载保护:为避免传感器在受到超量程力作用时损坏,需要设计有效的过载保护结构,这在技术上具有挑战性。
温度漂移和稳定性控制:传感器必须具备良好的温度补偿机制,以减少温度变化对测量结果的影响,并保持长期稳定性。
多通道信号处理:六维力传感器需要同时处理多个方向的力和力矩信号,这要求高度精确的信号采集和处理技术。
交叉干扰和耦合误差:在多维力传感器中,不同方向的力和力矩之间可能存在耦合,需要通过精确的解耦算法来分离这些信号。一般说来,降低耦合干扰的两种途径:结构解耦、算法解耦。结构解耦和算法解耦通常需要结合使用,以实现最佳的解耦效果。结构解耦可以减少耦合效应,降低算法解耦的难度;而算法解耦可以进一步校正结构解耦难以消除的耦合干扰,提高测量精度。
标定和校准技术:六维力传感器需要通过复杂的标定和校准过程来确保测量精度,这通常涉及到精确的测试设备和方法。
传感器融合:在某些应用中,需要将力传感器与其他类型的传感器(如位置、速度、加速度传感器)相结合,解决不同传感器之间数据融合的技术难题。
材料选择和加工工艺:选择合适的材料并优化其性能是技术难点之一,同时,力传感器的生产涉及精密的加工工艺。
小型化和轻量化:在保持性能的前提下,减小传感器的体积和重量,以适应空间受限的应用场合。
实时数据处理:开发高效的数据处理算法,以实现实时或近实时的数据处理和反馈。
长期稳定性和可靠性:传感器需要在各种环境条件下保持长期稳定工作,材料老化和疲劳寿命是设计时需要考虑的因素。
成本控制:在保证技术性能的同时,如何有效控制力传感器的生产成本,是实现传感器商业化的关键。
精度和分辨率:六维力传感器需要具备高测量精度和分辨率,以满足高精度应用的需求。
系统集成:将六维力传感器集成到机器人或其他自动化系统中,需要解决机械设计、电子接口和软件兼容性等问题。
05、在人形机器人中的应用场景
当前,六维力传感器被广泛应用于汽车行业的碰撞测试、轮毂、座椅等零部件测试以及航空航天飞行器、生物力学、医疗领域、科研实验、机器人与工业自动化等众多科技领域。
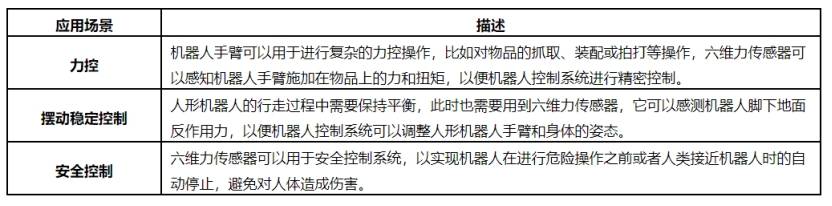
表:六维力传感器在人形机器人领域的主要应用场景
人形机器人领域,六维力传感器已成为高性能人形机器人的标配,通常安装在手腕、脚腕、足底或手部,在运控规划、姿态调整、力度感知等中起到重要作用,以提升手部操作的灵活性以及脚部行走的稳定性,提升人形机器人在复杂环境中的自主性和适应性,可以实现在碎石、地砖、草坪、厚地、草坪等不平整地面上稳定快速行走,通过全新的脚掌姿态控制算法以及柔性自适应多种地面。
目前特斯拉Optimus、优必选Walker X、达闼科技的小紫XR-4、本田ASIMO、美国宇航局的Valkyrie等,都已采用六维力传感器来提升机器人的性能。
以下是六维力传感器在人形机器人中的一些关键应用和安装位置:
手腕部位:六维力传感器安装在手腕部位,可以帮助机器人实现精细的手部操作,如抓握、搬运和装配等任务。
脚腕、足底:在脚腕或足底安装六维力传感器,有助于机器人在行走和平衡控制中感知地面的反作用力,以便机器人控制系统可以调整人形机器人手臂和身体的姿态,提高行走稳定性。
手部接触点:在机器人手部的接触点安装六维力传感器,可以提升手部操作的灵活性和适应性,特别是在需要柔顺控制的场景中。
运控规划:六维力传感器提供的数据对于机器人的运动控制规划至关重要,它们可以帮助机器人更好地规划动作,避免碰撞和损伤。
姿态调整:在机器人的姿态调整过程中,六维力传感器可以提供必要的反馈信息,帮助机器人保持平衡和稳定。
力度感知:六维力传感器使机器人能够感知与外界物体交互时的力度,这对于需要精确控制力度的应用非常重要。
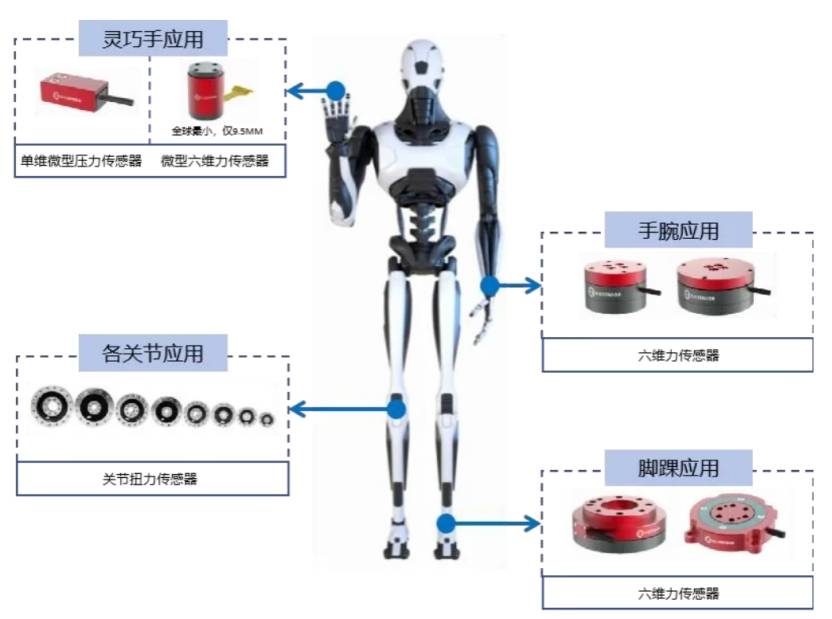
六维力传感器适用于人形机器人的手腕、脚踝、灵巧手等部位
此外,人形机器人还可能使用三维力传感器、关节扭矩传感器或一维拉力传感器,同时有些也会用到触觉传感器、电子皮肤等。
多维力传感器的组合使用:在一些应用中,除了六维力传感器,人形机器人也可能同时使用三维力传感器、关节扭矩传感器或一维拉力传感器,以满足不同的控制需求。如特斯拉Optimus前部可能在脚趾部位增加了一维力传感器,来获得更多点信息,以便适应更加复杂的地面场景。
触觉传感器和电子皮肤:除了力传感器,人形机器人还可能集成触觉传感器和电子皮肤,以提供更全面的环境感知能力。
06、六维力传感器成本分析
六维力传感器成本构成包括材料、制造和人工成本,其中超 50%的成本来自于应变片和人工加工成本。
作为六维力传感器的核心组成部分,高质量的应变片成本较高,单个六维力矩传感器所需要应变片的数量至少为 24 个,考虑到抗温漂、蠕变等需求,一般单个六维力矩传感器的应变片的数量约为 30-40 个,单个六维力矩传感器应变片的成本在 5000-6000 元。
六维力传感器成品对于精度、准度要求极高,因此人工加工技术壁垒较高,尤其贴片与标定阶段,需要大量的技术工人进行精细操作,且短期无法实现自动化生产。未来,MEMS工艺可能是实现六维力传感器高效生产的主要方向,叠加生产自动化率提升将有助降本。
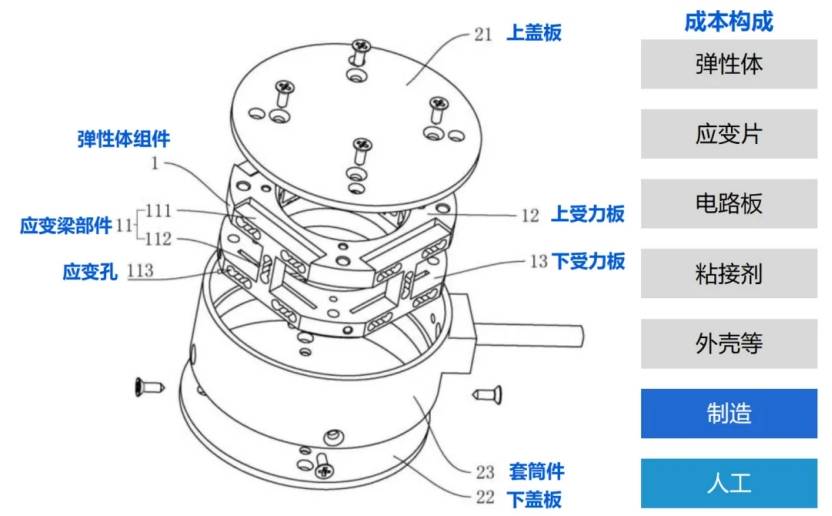
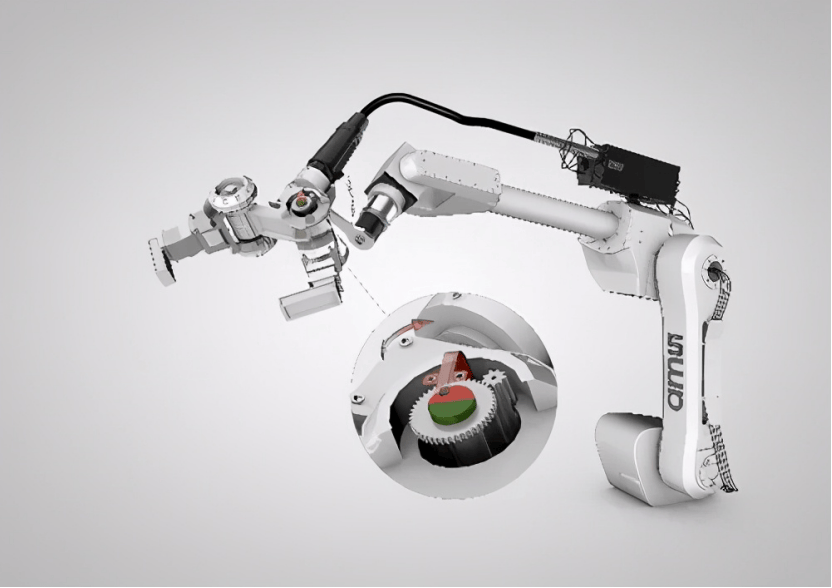
一种高精度六维力传感器的爆炸图,材料成本中应变片占比高资料来源:《一种高精度六维力传感器_吴美贞等》、《一种微型应变式六维力传感器及其标定装置_王鹏等》
在六维力传感器下游应用中,工业自动化(包含传统机器人)领域应用规模占比最大,但人形机器人行业应用规模增速最快。根据 MIR 数据,2023 年六维力传感器仍主要应用于工业自动化领域,应用规模占比超过 77%,其次是汽车;但在人形机器人行业应用规模同比增长146.7%,远超其他行业增速。在人形机器人量产加速、降价迫切的预期下,六维力传感器或将迎来降价潮。
六维力开发的难度和壁垒高,在市场基数较小的当下价格昂贵,远高于低维力传感器。根据 MIR 调研,六维力传感器的成本在数千元,而产品单价可达2-4万元,表明其利润率较高,存在较大的降价空间,有利于未来成本的降低和市场竞争力的提升。预计两年内单个六维力传感器产品的价格可能下降至5000元以内。这一降价潮可能会吸引更多的应用和市场参与者,推动行业的快速发展和新一轮的洗牌。
07、六维力传感器市场格局及典型企业
目前,国产六维力传感器与外资主流产品在精准度方面已基本对齐,但在灵敏度、串扰、抗过载能力及维间耦合误差等方面仍存在差距,且真正具备批量化产品供应能力的厂商依然偏少。根据 MIR 数据,近几年国内品牌凭借供应链优势进一步降低成本,在保证性能的同时提供价格更低的产品以及优质的服务,国产化率逐步提升。但目前国产厂商市场份额仅仅略高于 30%,国内六维力传感器市场仍以外资品牌为主,外资品牌在产品和应用上占有较大先发优势。
从国内市场来看,六维力传感器市场集中度较高,CR5 占比超过 50%。其中 ATI(美国)占据绝对龙头地位,份额占比为 22.4%,其次是宇立仪器(中国)占比 12.2%、Epson(日本)占比 6.4%、蓝点触控(中国)占比 4.8%、坤维科技(中国)占比 4.7%。
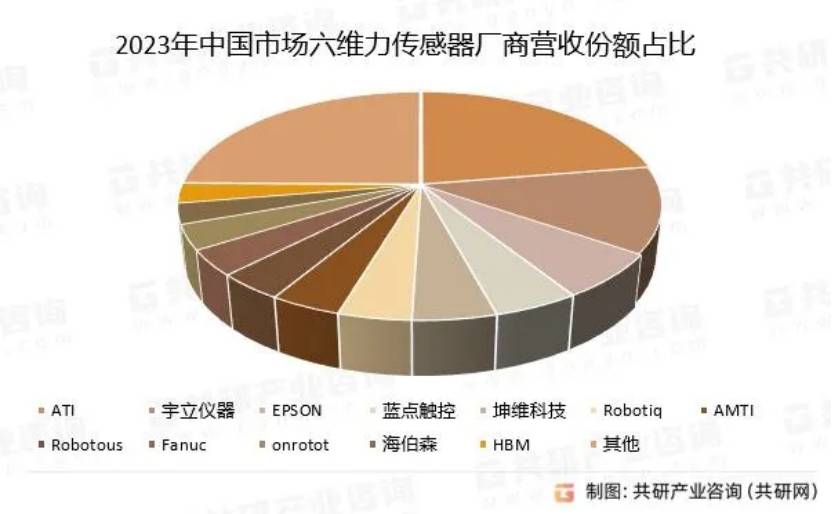
资料来源:共研产业咨询(共研网)
从代表企业分布来看,全球六维力传感器主要分为日韩品牌、欧美品牌和国产品牌三大阵营。各阵营企业呈现不同的配套特点:
日韩地区,六维力传感器厂商主要配套当地机器人本体厂商。根据 GGII,日韩地区六维力/力矩传感器厂商主要配套当地机器人本体厂商,如韩国企业 Robotous、Aidin Robotics 主要合作厂商包括 Doosan Robotics、Neuromeka 和 Rainbow Robotics;日本企业 Sintokogio 和WACOH-TECH 主要合作厂商包括发那科、电装、三菱、那智不二越、安川等,Epson 的六维力传感器则主要配套 Epson 的工业机器人使用。
欧美地区,六维力传感器厂商可分为传统传感器厂商、机器人末端工具厂商两类:
传统的传感器生产商,包括 ATI、Bota Systems AG、ME-Meßsysteme GmbH、AMTl、Kistler 等;
全球知名的机器人末端工具生产商,主要有 SCHUNK、OnRobot、Robotiq 等,欧美地区厂商合作企业以协作机器人本体厂商为主,主要包括优傲机器人、达明机器人和欧姆龙等。
近年来,国产六维力传感器厂商逐渐成长,如宇立仪器(SRI)、坤维科技、鑫精诚、海伯森、蓝点触控、神源生智能、瑞尔特等,均已有相关产品落地并进入产业化应用。其他厂商如重庆鲁班机器人技术研究院、埃力智能等,通过自主研发力传感器技术,已经具备六维力/力矩传感器的生产能力,部分产品型号开始进入下游用户的验证测试阶段。
文章来源:搜狐网
广州国际智能制造技术与装备展览会(SPS–Smart Production Solutions Guangzhou, 前称SIAF)即将于2025年2月25-27日在中国进出口商品交易会展馆举行。展会将与母展德国智能生产解决方案展览会(SPS)同步,融入SPS品牌全球网络的行业资源。2025 SPS广州智能制造展将以“深耕工业自动化,成就多元产业应用”为主题,汇聚前沿的控制技术,电气驱动及运动控制、传感技术、连接技术、人机界面装置、工业通讯、工业软件及信息技术、机械基础设施、智能装备及系统集成、机器人技术等,同时结合数字化转型发展,聚焦智能制造,推动制造业向数字化、网络化、智能化发展,助力中国制造业在新质生产力的推动下迎来更加广阔的发展空间。展会火热招展中,欢迎联系我们预订展台。广州国际智能制造技术与装备展览会更多资讯,详情请登陆官网 https://spsg.gymf.com.cn
| 凡本网注明“来源:广州光亚法兰克福展览有限公司”的所有作品,版权均属于广州光亚法兰克福展览有限公司,转载请注明。 凡注明为其它来源的信息,均转载自其它媒体,转载目的在于传递更多信息,并不代表本网赞同其观点及对其真实性负责。若作者对转载有任何异议,请联络本网站,联系方式:020-89816057;我们将及时予以更正。 |


深耕自动化,成就多元产业应用
欢迎莅临广州国际智能制造技术与装备展览会!
主办单位官方微信

